Как мы самокат к телеметрии подключали
Каждый из нас заметил кратно увеличивающееся количество электросамокатов в городе. И, конечно, немалая часть этих самокатов приходится на кикшеринг, самокаты по подписке и обычную аренду электротранспорта в парках.

Посмотрим на компании, которые различными способами сдают в аренду самокат на предмет необходимости телеметрии:
| Тип аренды | Городская поминутная аренда. Пользователь оплачивает каждую минуту пользования самокатом. |
Самокат по подписке. Пользователь платит ежемесячно около 3000 руб за безлимитное использование самоката |
Почасовая аренда в парках. Пользователь на территории парка берет самокат в аренду на несколько часов. |
|---|---|---|---|
| Пример компаний | MOLNIA, URENT, Whoosh | Мой самокат | «Прокат в парке», PROкачу |
| Нужен ли удаленный контроль доступа (телеметрия) | Да, жизненно необходим, но такие компании конечно же сами разработали решение, и сами пользуются | Да, для отключения в случае неудачного очередного списания средств по подписке, и, конечно, отслеживать геопозицию в случае хищения. Сейчас не используют телеметрию. | Да, отслеживать геопозицию в случае хищения и удаленно блокировать включение самоката |
И вот как раз для последних двух типов компаний мы решили разработать универсальное решение для телеметрии самокатов.
Входные данные:
- Самокат Yamato 0809

Задача:
- Отслеживать геопозицию
- Удаленно блокировать включение самоката
- Отслеживать уровень потребления питания
- Удаленно блокировать колесо самоката
- Отслеживать вскрытие
- Удаленно изменять частоту отправки данных
При этом контроллер телеметрии не должен потреблять большое количество энергии от аккумулятора.
Какие есть ограничения и сложности?
- Размер контроллера
В деке есть немного свободного места для размещения контроллера.
При этом не в каждом самокате есть свободное место в деке. - Размещение антенны
К контроллеру должны быть подключены антенны GSM и GPS. При этом если они будут находиться под декой, то качество связи будет крайне низким, скорее всего придется вытягивать антену на поверхность самоката. - Скорость монтажа оборудования на самокат
Необходимо сделать подключения максимально бытсрым, желательно Plug&Play, чтобы не тратить много времени на интеграцию и быстро масштабироваться.
Создание и программирование контроллера.
Тяжело детально описать, как происходит разводка платы, ее производство, программирование, поэтому просто оставлю здесь фото платы, а позже добавим отдельный проект с описанием разработки.
Монтаж тестового образца.
Первая же версия контроллера сразу оказалась рабочей, но мы не предусмотрели 2 детали – о них чуть позже.

Провели монтаж тестовой платы, и разместили антены прямо поверх корпуса и проехали пару километров, данные увидели в логах на сервере, значит что-то да передается. Теперь надо проверить корректность данных.

Дизайнер в это время накидал макет в figma для удобного просмотра маршрута на карте.
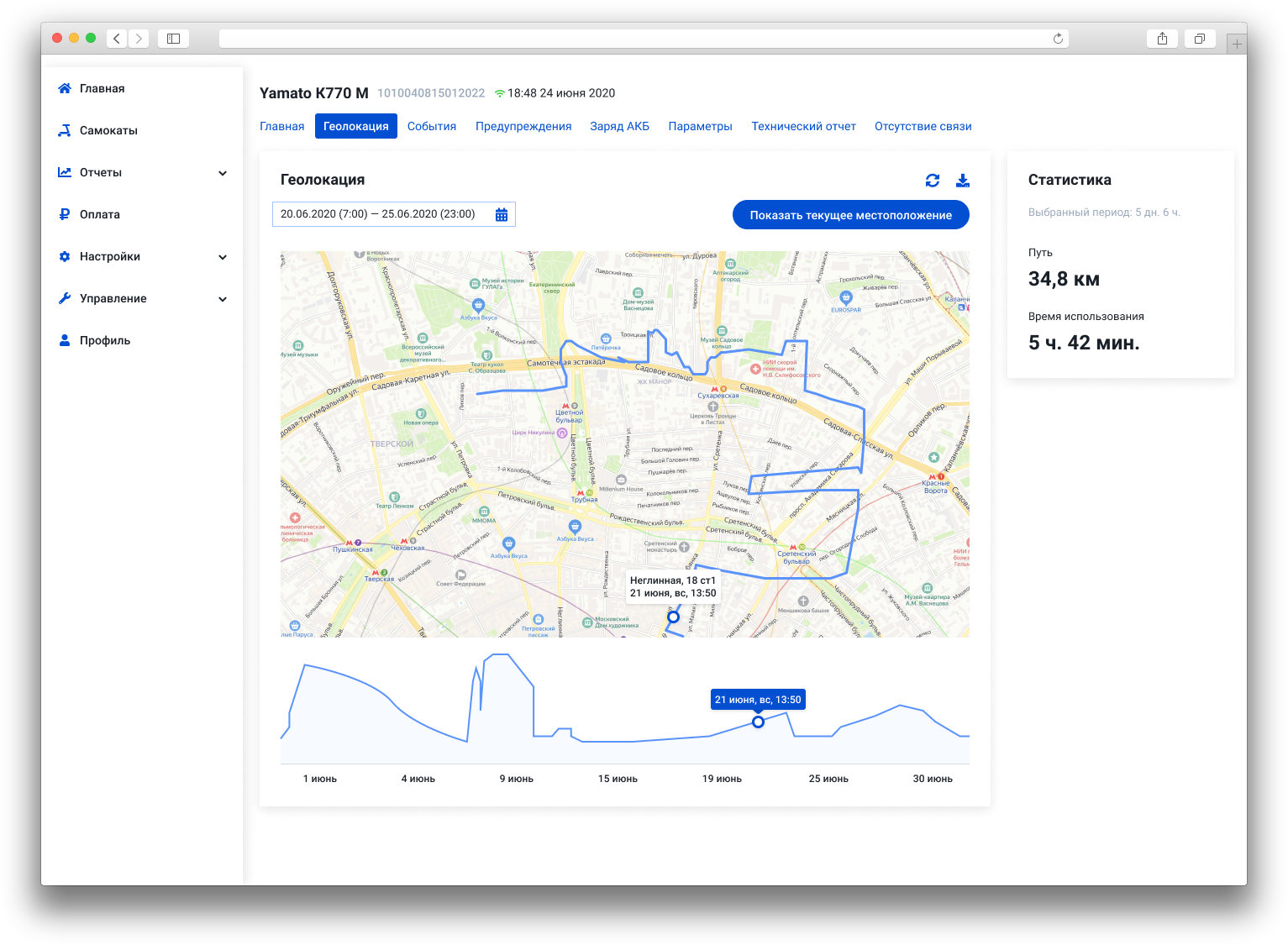
Быстренько сверстали интерфейс для отображения маршрута, он далеко не соответствует макету, но уже можно проверить точность передаваемых данных.

Следующий шаг – разместить антены внутри самоката, но тут мы как раз столкнулись со сложностями:
- Разъем антен SMA достаточно громоздский и его не протянуть из деки, где размещается контроллер в рулевую часть.
- Вся рулевая состоит из металла, который очень плохо пропускает сигнал GPS.
Разъем SMA мы заменили на другой, а вот с пропускной способностью сигнала задача решалась нетривиально. Тут не обошлось без магии и волшебства от наших инженеров, но в итоге мы добились стабильного качества связи, разместив антены прямо в рулевой части самоката.

Подготовили презентацию и отправляем ее потенциальным клиентам, позже расскажем, что из этого вышло.